
NAIST Robotics Laboratory
Topics
Lab intro video
→youtube(Robotics-Lab channel)
Research groups
Sensing group
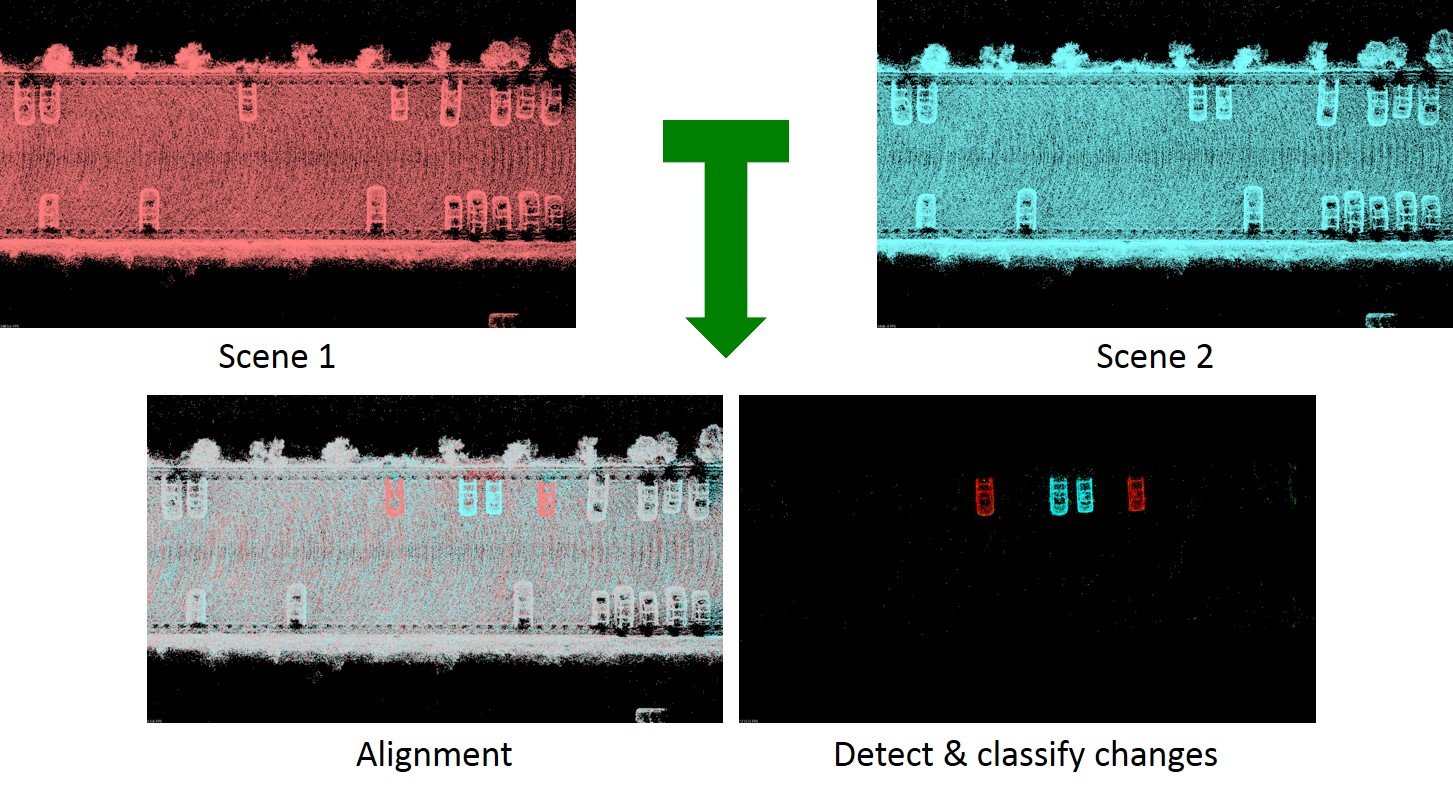
- Environmental modeling
- Interface
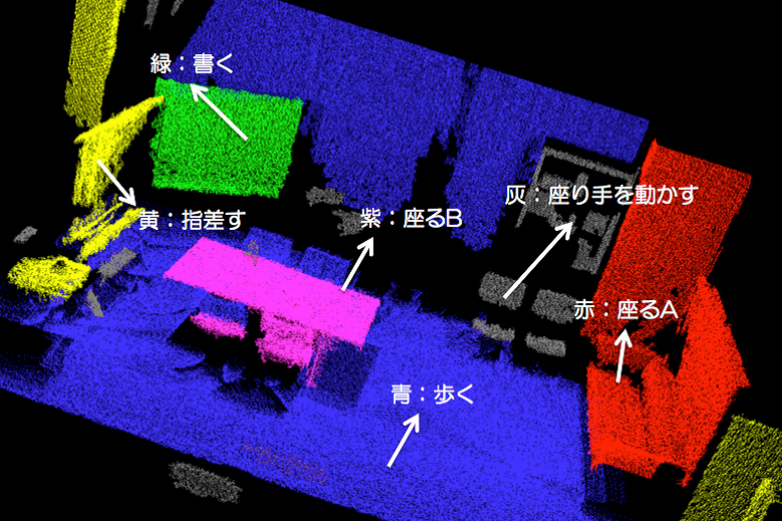
- Summarization of tasks using first person RGB-D video
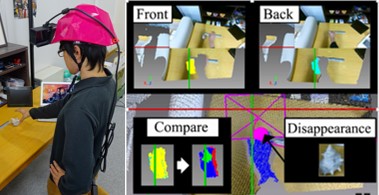
- Analyzing 3D point-of-regards in real world



- Mobile robot
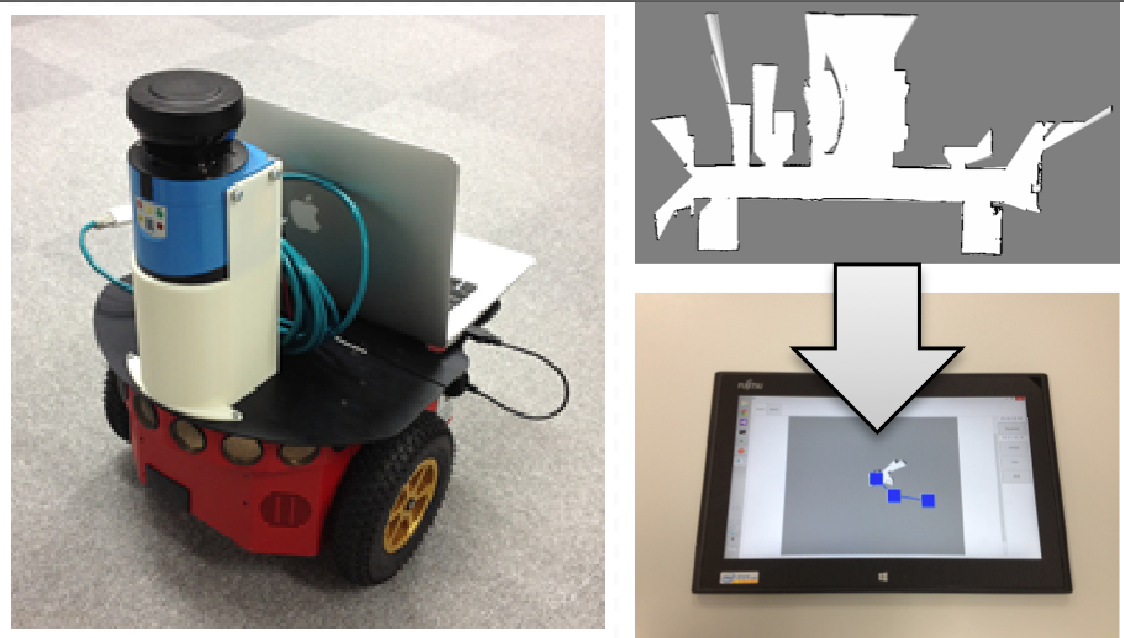
- Remote control of multiple mobile robots using touching interface
- Mobile robot system to realize human-robot co-existence
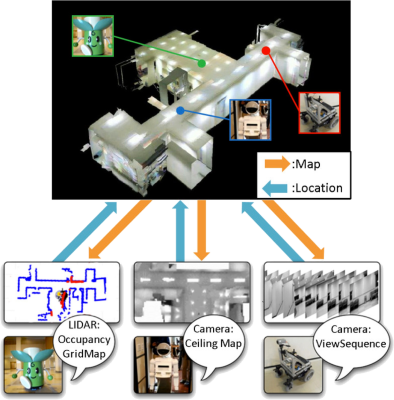
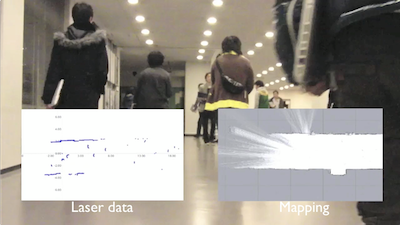
- Realtime SLAM under dynamic crowded scene



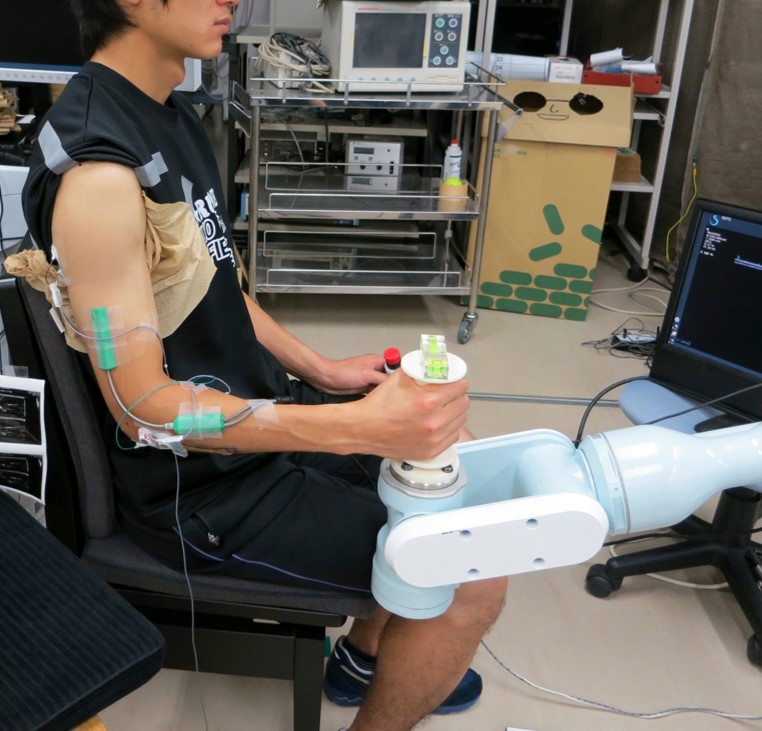
- Robotic training system
- Pinpointed muscle training based on musculoskeletal model

Service robot group
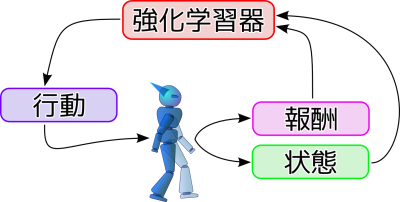
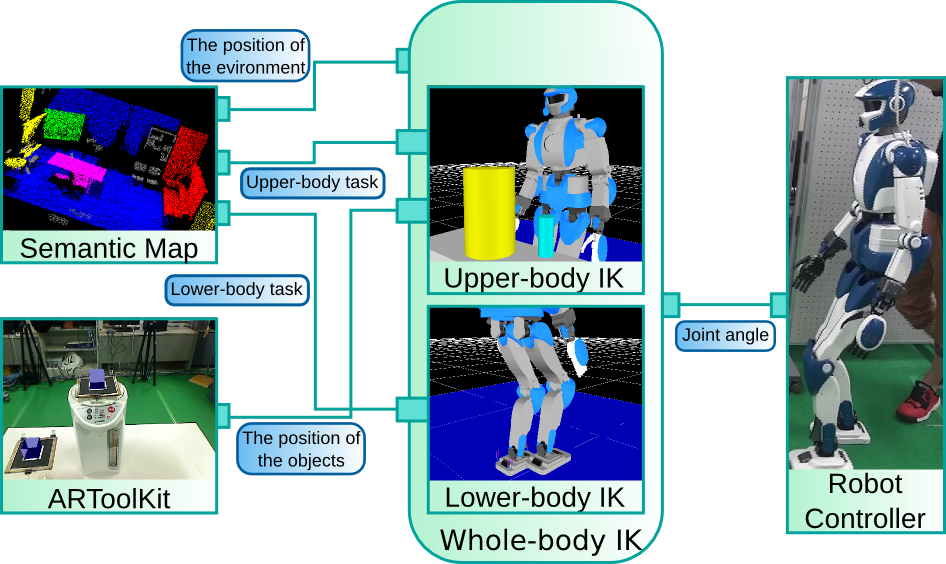
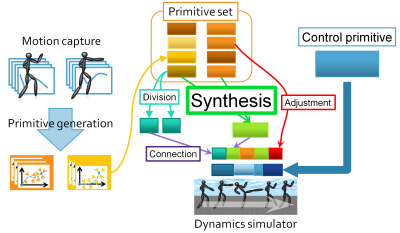
- Motion Learning
- Human-robot interaction


Human modeling group
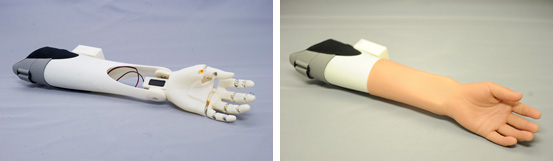
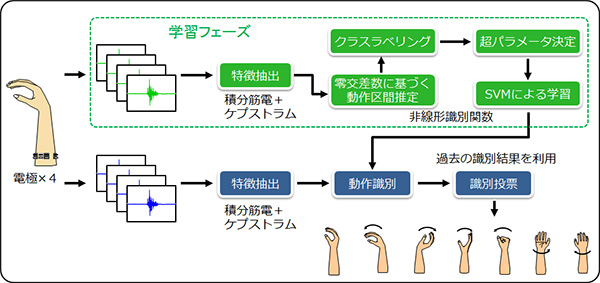
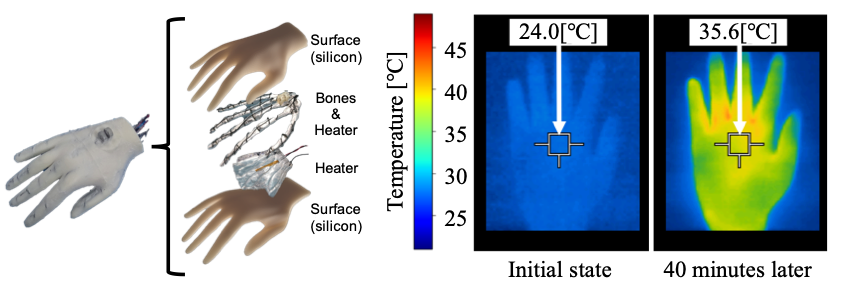
- Electric prosthesis

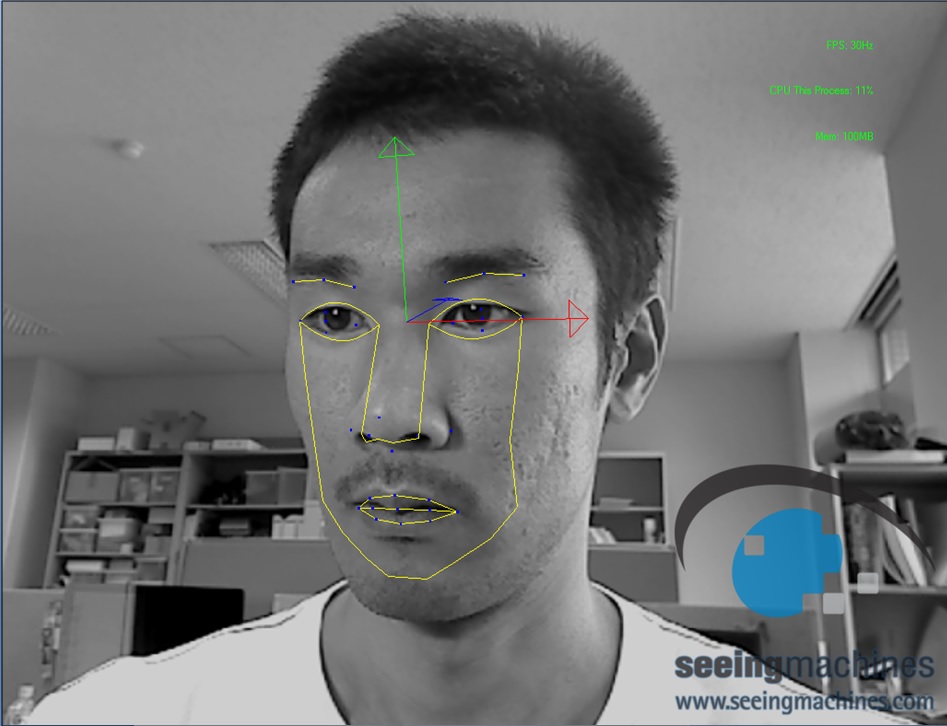
- Human interface
Research Index
Posters to introduce research in 2019
 研究室紹介 |  IMUセンサを用いた足裏荷重予測による遅延のない下肢外骨格制御 |  Transferring Touch Feeling Between Different Users Using Haptic Sensor |  距離センサアレイを用いた上腕形状計測に基づく上肢姿勢と関節トルクの推定 |
 ハンドスケーリングにおける歯科衛生士の技術定量化とその評価 |  全天球画像を用いた人間共同作業環境下でのロボットアーム周囲の人間の観測 |  部品の干渉および挿入可能特性を考慮した3Dモデルに基づく組立順序の最適化 |  Quaternion Based Adaptive Kalman Filter for Online Extrinsic Parameter Estimation of Multiple RGB-D Cameras |
 周波数の反射特性を用いた透明・鏡平面の方位角推定手法の開発 |  Adaptive Bingham Distribution Based Filter for SE(3) Estimation |  Estimation of Upper limb Motion Based on Skin Deformation Measured with a Distance Sensor Array |