
NAIST Robotics Laboratory
モーションキャプチャデータの多様化
運動学習プリミティブの演算による動作の多様化
ロボットやCGキャラクタの動作生成のために,モーションキャプチャなどのシステムを利用する方法が普及しています. しかしながら,モーションキャプチャで取得した動作のみでは,決まりきった動作しか生成できません.
そこで,この研究では,「運動学習プリミティブ」という表現形を用いて動作を表現し,運動学習プリミティブに対する演算を定義することによって動作を多様化する手法を開発しました.
運動学習プリミティブ
運動学習プリミティブは,非線形の力学系を用いて動作を表現するものです.これにより,単に関節角の時系列データを保持する場合に比べて,
- パンチ動作の打点変更など,動作の到達位置(姿勢)や到達時間を自然に変更できる
- 任意の位置から動作を開始できる
という利点があります.
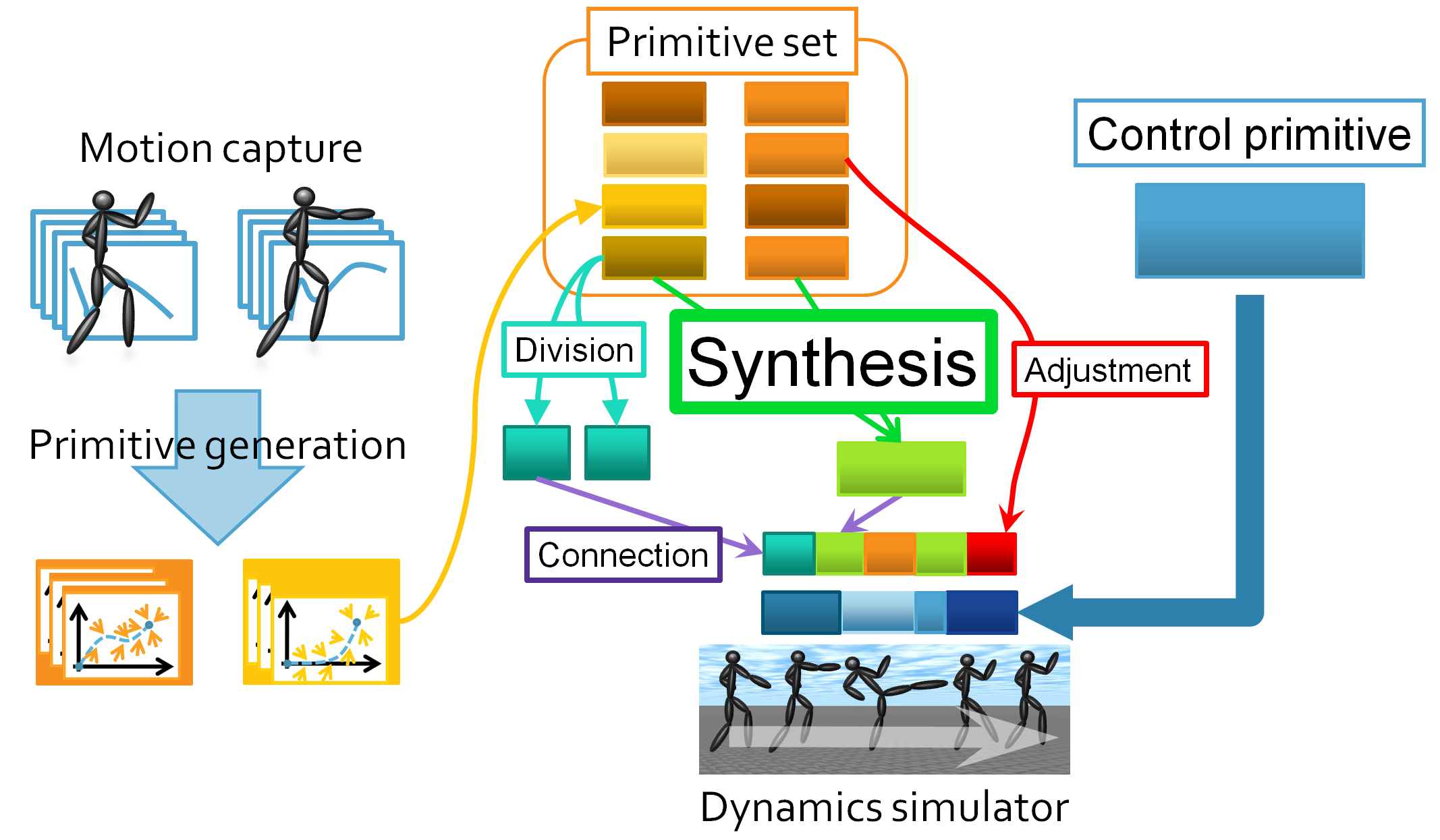
運動学習プリミティブの演算
この研究では,運動学習プリミティブに対して以下のような演算を定義しました.
- ふたつの運動学習プリミティブを連結
- ひとつの運動学習プリミティブを任意の時間で分割
- ふたつの運動学習プリミティブを時間的に並列に合成
適用例
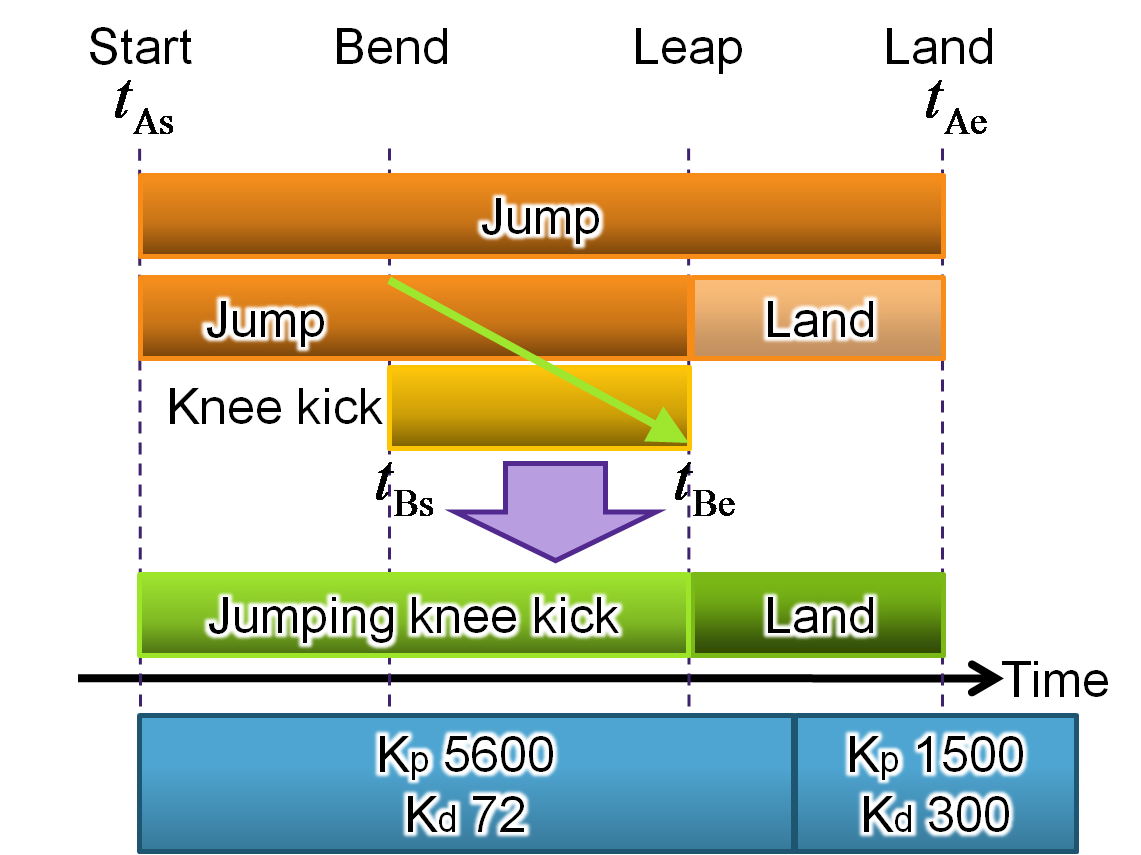
以下のような動作をプリミティブとしてデータベース化しているとします.
このとき,跳躍と膝蹴りを「合成」することによって,以下のようにとび膝蹴りが実現できます.
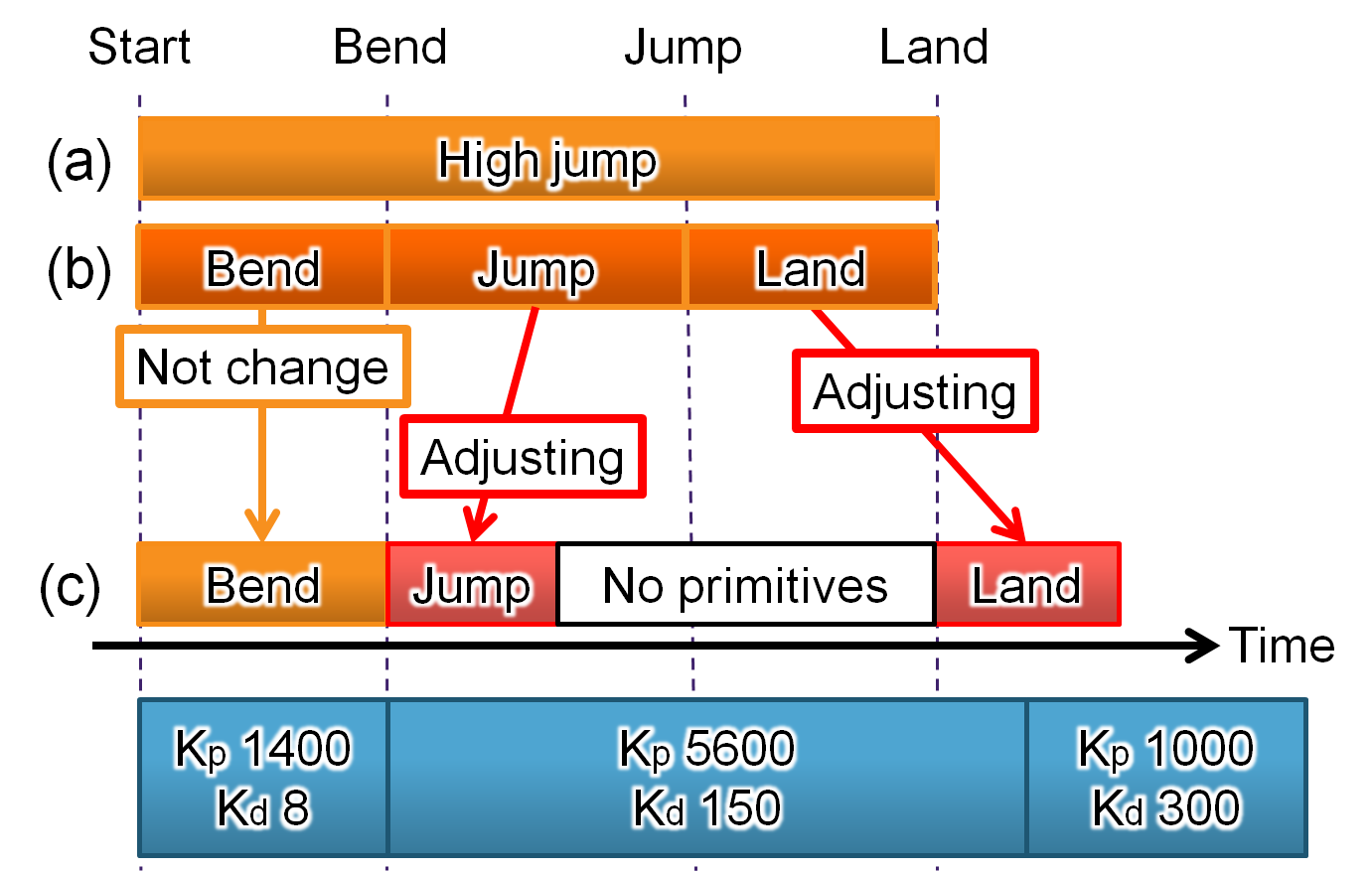
次の例は,跳躍を屈伸部や着地部で分割し,時間調整することによって生成した,「スーパーハイジャンプ」です.
メンバー
- 竹内 喜之
- 山口 明彦
主要関連論文
- 竹内 喜之, 山口 明彦, 竹村 憲太郎, 高松 淳, 小笠原 司: モーションキャプチャデータから多様な動作生成を可能にする運動学習プリミティブの合成, 第10回システムインテグレーション部門講演会(SI2009), 1M4_7, pp.824-827, 2009年12月.