
NAIST Robotics Laboratory
3次元セマンティックマップ
サービスロボットが人に対して適切なサポートを行うことを考えた場合,対象である人が何を欲しているか,意図を推定することが必要となります.人の取りえる行動は環境に強く影響を受けており(例:アフォーダンス),今いる状況から適切な支援動作を限定することが可能であると考えています.
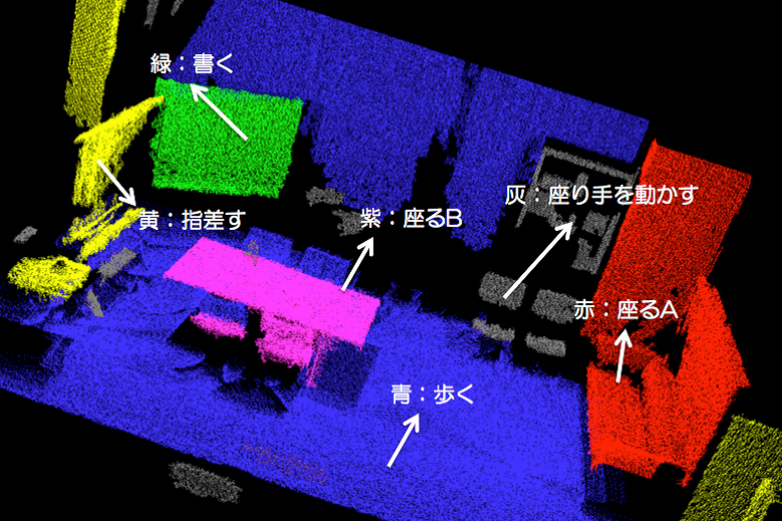
本研究では,環境と取りえる行動のデータベース「3次元セマンティックマップ」を構築することを目指しています.これまで培ってきた環境計測技術とモーションキャプチャによる行動記録を同一座標系で表現し,行動および環境を特徴量化し,分類することで,セマンティックマップを構築する方法を提案しています.